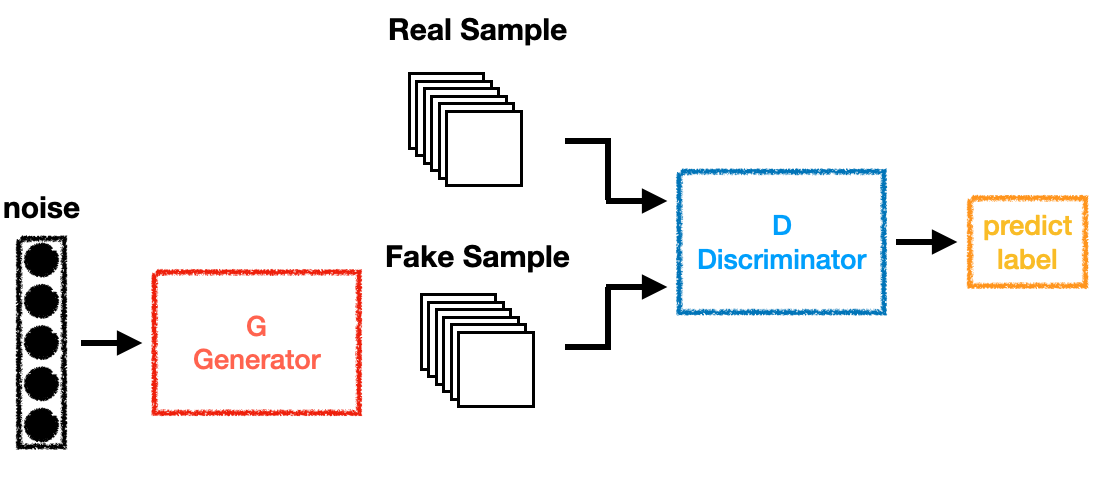
Generative Adversarial Network 前言 GAN基本的概念前一篇有稍微介紹過了,然而要怎麼證明這個概念要如何套用到類神經網路呢?Goodfellow透過了Minimax Theorem來訓練網路,詳細證明過程可以看Scott Rome 的Blogger,裡面有很詳細的介紹了怎麼透過Shannon Entropy跟Kullback-Leibler Divergence來一步一步的證明怎麼可以收斂(Nash Equilibrium)。
$$
\min_{G}\max_{D}V(D,G)=\mathbb{E}_{x\sim p_{data}(x)}[\log D(x)]+\mathbb{E}_{z\sim p_z(z)}[\log (1-D(G(z)))]
$$
演算法 我把GAN的演算法翻成中文:
Adversarial Attack 在網路上找資料的時候,看到一篇Goodfellow在OpenAI發的Adversarial Example ,上面有一個例子:
這些例子大多是在圖像分類任務中找到的,這代表了當時的深度學習模型可能不穩定,也有可能會被惡意利用導致有安全疑慮。Adversarial Attack主要是將圖片加上特定的bias就可以讓分類器誤判,讓研究者對模型的信心下降、也有可能利用這個漏洞製造出一個特定的輸出,當然也可能反過來,把一個特定的輸入修改到讓輸出是特定值。
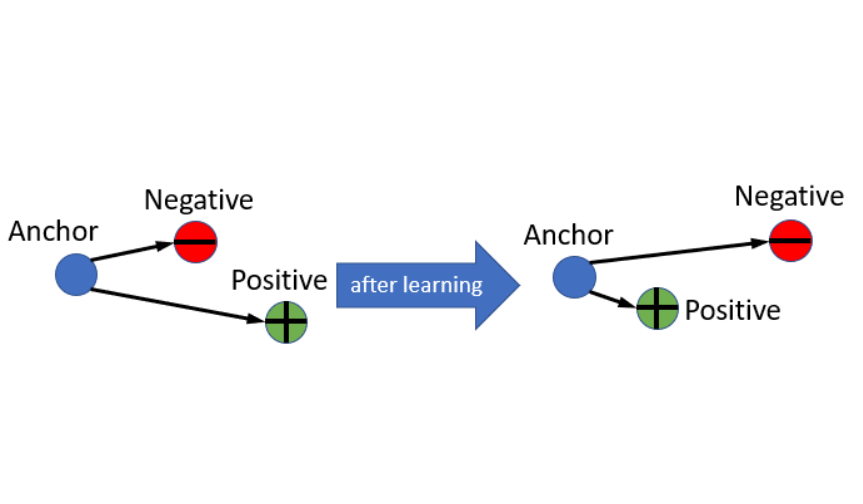
同樣的道理,我們可以透過對抗用Generator使分類器獲得的樣本多樣性更高,或者說分佈更廣些,也就是這樣會加強模型,讓模型的泛化性更高,詳細的內容可以看網站上的敘述,除了上面圖片的例子,Goodfellow還用了其他類別的資料來展示,有興趣的可以去研讀一下那篇文章。
前處理和類神經網路 參數宣告 使用absl這個套件來控制儲存路徑和訓練時的一些參數。
1 2 3 4 5 6 7 8 9 10 11 12 13 from absl import appfrom absl import flagsfrom absl import loggingFLAGS = flags.FLAGS flags.DEFINE_string('LOG_PATH' , 'logs/' , 'path to log_dir' ) flags.DEFINE_string('MODEL_PATH' , 'models/' , 'path to save the model' ) flags.DEFINE_integer('noise_dim' , 100 , 'noise dimension' ) flags.DEFINE_integer('BATCH_SIZE' , 256 , 'batch size' ) flags.DEFINE_float('lr' , 2e-4 , 'learning rate' ) flags.DEFINE_integer('epochs' , 120 , 'epoch' )
資料集 & 網路架構 這邊使用MNIST當作訓練資料,不過因為是要訓練GAN所以要訂出一個noise,而這邊的noise主要是為了Generator在產生圖片的時候用的,因為在每個Epoch都使用固定的noise當作網路的輸入,就可以觀察到對於同樣noise的輸出圖片在訓練過程中的變化了:
1 2 3 4 5 6 7 8 9 10 11 12 13 import tensorflow as tffrom tensorflow.keras.datasets.mnist import load_data[(train_x, train_y), (test_x, test_y)] = load_data('mnist.npz' ) train_images = train_x.reshape(train_x.shape[0 ], 28 , 28 , 1 ).astype('float32' ) train_images = (train_images - 127.5 ) / 127.5 train_dataset = tf.data.Dataset.from_tensor_slices(train_images) train_dataset = train_dataset.shuffle(60000 ) train_dataset = train_dataset.batch(FLAGS.BATCH_SIZE) NOISE = tf.random.normal([16 , FLAGS.noise_dim])
對於網路的架構,我簡單的使用全連結層來架構Generator跟Discriminator,而非擅長處理圖像資料的CNN:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 from tensorflow.keras import Modelfrom tensorflow.keras.layers import ( Flatten, Dense, Reshape, Input, ) from absl.flags import FLAGSdef Dis_Net (): x = inputs = Input([28 , 28 , 1 ]) x = Flatten()(x) x = Dense(512 , activation='relu' )(x) x = Dense(256 , activation='relu' )(x) x = Dense(128 , activation='relu' )(x) output = Dense(1 , activation='sigmoid' )(x) return Model(inputs, output, name='Discriminator' ) def Gen_Net (): x = inputs = Input([FLAGS.noise_dim]) x = Dense(128 , activation='relu' )(x) x = Dense(256 , activation='relu' )(x) x = Dense(512 , activation='relu' )(x) x = Dense(28 * 28 * 1 , activation='tanh' )(x) output = Reshape((28 , 28 , 1 ))(x) return Model(inputs, output, name='Generator' )
Gen & Dis Net, Optimizer and Loss Function 將Generator跟Discriminator還有Optimizer定義出來,跟一般訓練網路不太一樣,Optimizer有兩個,分別對應Generator跟Discriminatotr,然後Optimizer使用的是Adam,因為Generator會需要訓練快點,所以我將Generator的learning rate設定成Discriminator的5倍,用來加快Generator的收斂:
1 2 3 4 5 6 7 def setup_model (): Generator = Gen_Net() Discriminator = Dis_Net() G_opt = tf.keras.optimizers.Adam(FLAGS.lr*5 , 0.5 ) D_opt = tf.keras.optimizers.Adam(FLAGS.lr, 0.5 ) return Generator, Discriminator, G_opt, D_opt
Loss的部分對於Disciminator跟Generator用的是Binary的Cross Entropy:
1 2 3 4 5 6 7 8 9 10 11 12 import tensorflow as tfcross_entropy = tf.keras.losses.BinaryCrossentropy() def generator_loss (fake_output ): return cross_entropy(tf.ones_like(fake_output), fake_output) def discriminator_loss (real_output, fake_output ): real_loss = cross_entropy(tf.ones_like(real_output), real_output) fake_loss = cross_entropy(tf.zeros_like(fake_output), fake_output) return real_loss, fake_loss
訓練過程 訓練過程跟一般的網路訓練過程差不多,計算loss、更新網路的過程、記錄需要紀錄的各個參數等等。
Each Epoch Training 對於網路的訓練跟一般比較不一樣,主要是因為這邊有兩個網路需要更新,所以會有兩個GradientTape分別來更新兩個網路。其中loss是一個list,裡面每一個item是一個tf.keras.metrics.Mean(),用來記錄各個loss:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 @tf.function def train_step (models, opts, images, loss ): Generator, Discriminator = models G_opt, D_opt = opts noise = tf.random.normal([images.shape[0 ], FLAGS.noise_dim]) with tf.GradientTape() as gen_tape, tf.GradientTape() as disc_tape: generated_images = Generator(noise, training=True ) real_output = Discriminator(images, training=True ) fake_output = Discriminator(generated_images, training=True ) gen_loss = generator_loss(fake_output) real_loss, fake_loss = discriminator_loss(real_output, fake_output) disc_loss = real_loss + fake_loss loss[0 ].update_state(real_output) loss[1 ].update_state(fake_output) loss[2 ].update_state(gen_loss) loss[3 ].update_state(disc_loss) gradients_of_gen = gen_tape.gradient(gen_loss, Generator.trainable_variables) gradients_of_dis = disc_tape.gradient(disc_loss, Discriminator.trainable_variables) G_opt.apply_gradients(zip (gradients_of_gen, Generator.trainable_variables)) D_opt.apply_gradients(zip (gradients_of_dis, Discriminator.trainable_variables))
Whole Training Process 將前面所寫的兜在一塊就是整體的訓練過程:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 log_path = os.path.join(FLAGS.LOG_PATH) if not os.path.exists(log_path): os.mkdir(log_path) csv_path = os.path.join(log_path, 'loss.csv' ) with open (csv_path, 'w' ) as f: f.write('epoch,Real_P,Fake_P,Gen_loss,Dis_loss\n' ) format_str = '{:5d},{:.6f},{:.6f},{:.6f},{:.6f}\n' dis_r_p = tf.keras.metrics.Mean() dis_f_p = tf.keras.metrics.Mean() G_loss = tf.keras.metrics.Mean() D_loss = tf.keras.metrics.Mean() loss = [dis_r_p, dis_f_p, G_loss, D_loss] Generator, Discriminator, G_opt, D_opt = setup_model() models = [Generator, Discriminator] opts = [G_opt, D_opt] for epoch in range (FLAGS.epochs): start = time.time() for image_batch in tqdm(train_dataset.as_numpy_iterator()): train_step(models, opts, image_batch, loss) with open (csv_path, 'a' ) as f: f.write(format_str.format (epoch, loss[0 ].result().numpy(), loss[1 ].result().numpy(), loss[2 ].result().numpy(), loss[3 ].result().numpy())) loss[0 ].reset_states() loss[1 ].reset_states() loss[2 ].reset_states() loss[3 ].reset_states() generate_and_save_images(Generator(NOISE, training=False ), epoch + 1 ) if (epoch + 1 ) % 15 == 0 : Gen_save_path = os.path.join(FLAGS.MODEL_PATH, 'Generator' ) Dis_save_path = os.path.join(FLAGS.MODEL_PATH, 'Discriminator' ) Generator.save_weights(Gen_save_path) Discriminator.save_weights(Dis_save_path) logging.info('Time for epoch {} is {:.3f} sec' .format (epoch + 1 , time.time()-start)) time.sleep(0.2 )
Result 以下是訓練過程中Discriminator跟Generator的Loss:
Discriminator判斷真假的機率變化:
在這個Demo中,每個Epoch都用前面設定的固定noise生成16張圖片,以下為固定的noise在訓練過程中的變化:
結論 一直知道GAN是一個很強也很好用的技術,但是一直沒機會接觸到,直到最近終於有機會來學習這個技術,這個是目前火紅的GAN的原型,其他的GAN我再找時間一一實現。
Github:GAN-01 Generative Adversarial Network